[TFG – finalizado] Estrategias de despliegue en 1D y 2D con un equipo de robots móviles de bajo coste
Estrategias de despliegue en 1D y 2D con un equipo de robots móviles de bajo coste
Estudiante: Pedro Rodríguez Ladrón
Defendido en: 2018 (link)
Directores: Rosario Aragüés, Gonzalo López Nicolás
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingenería Electrónica y Automática
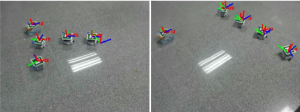
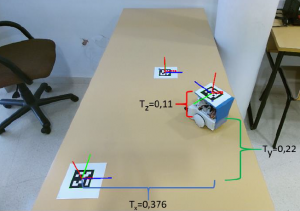
El objetivo del TFG era poner en marcha un equipo multi-robot de bajo coste y pequeñas dimensiones e implementar estrategias coordinadas de despliegue en 1D y 2D. Se coordinó un equipo de cuatro robots Sparki de Arcbotics para que realizasen movimientos de platooning y de control de formaciones.