[TFM – finalizado] Estrategias multi-robot basadas en encuentros intermitentes
Estrategias multi-robot basadas en encuentros intermitentes
Estudiante: Pablo Guallar
Defendido en: 2019 (canal de vídeos)(link)
Directores: Carlos Sagüés, Rosario Aragüés
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Máster Universitario en Ingeniería Industrial
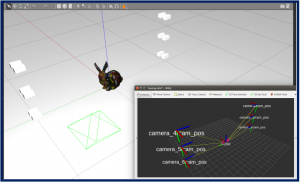
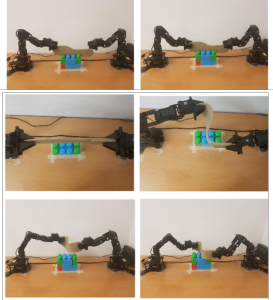
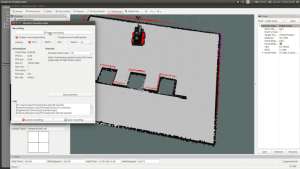
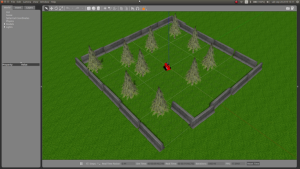
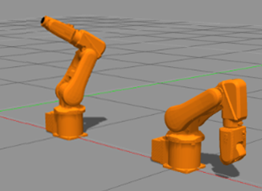
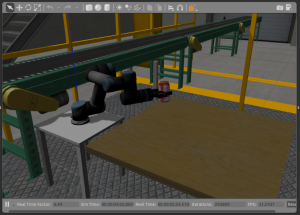
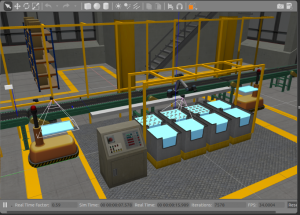
El objetivo del TFM era desarrollar un algoritmo de mantenimiento intermitente de las comunicaciones entre una serie de localizaciones en el entorno. Se adaptaron estrategias diseñadas para un modelo idealizado de robot para que funcionasen usando un equipo de robots móviles con restricciones de movimiento. Se comprobó su validez en un entorno de simulación basado en Gazebo/ROS.