[TFG – finalizado] Navegación autónoma de robot manipulador móvil con cámara y láser en el entorno ROS
Navegación autónoma de robot manipulador móvil con cámara y láser en el entorno ROS
Estudiante: David Barrera
Defendido en: 2020 (link)
(Canal de vídeos con los experimentos)
Directores: Rosario Aragüés, Gonzalo López-Nicolás
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingeniería Electrónica y Automática
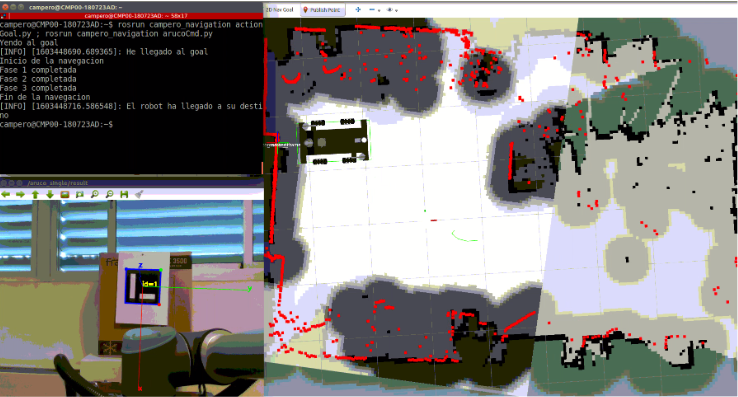

En este trabajo se ha usado el entorno ROS (Robot Operating System) para realizar la navegación autónoma de un robot manipulador móvil. La navegación se ha realizado tanto en simulación como en entornos reales. Se ha usado un robot conocido como robot Campero, que es un prototipo del robot comercial RB-EKEN (Robotnik). Para la navegación se usan tanto sensores láser como visión. Se han desarrollado varios programas para distintos tipos de navegación y se han analizado sus resultados. Además, este trabajo cuenta con información detallada sobre como usar el robot Campero en el entorno ROS, así como la información necesaria para replicar los experimentos.