EXPERIMENTAL METHODOLOGY
The objective of this study was to assess the performance and adaptability of the brain-teleoperated robot by able-bodied users in real settings. In the following sections we discuss the recruitment of the participants, followed by a detailed account of the experimental protocol.
Participants
The recruitment for participation in the study began after obtaining the approval of the protocol by the University of Zaragoza Institutional Review Board. The inclusion criteria for the recruitment of subjects were: (i) subjects within age group 20 - 25 years old; (ii) sex (either all women or all men); (iii) laterality (either all left-handed or all right-handed); and (iv) students of the engineering school at the University of Zaragoza. The exclusion criteria were: (i) subjects with history of neurological or psychiatric disorders; (ii) subjects under any psychiatric medication; and (iii) subjects with episodes of epilepsy, dyslexia or experiencing hallucination. Five healthy, 22 years old, male and right-handed students of the University of Zaragoza participated in the experiments. They were duly informed about the whole protocol of the study before getting the consent forms signed by each one of them. Permission to reproduce video recording and photographic images were duly taken from the subjects.
Experiment Design and Procedures
The study was accomplished in two phases: screening and training evaluation, and teleoperation evaluation.
Screening and training evaluation
The objective of this session was to screen and to train the subjects for the next stage, and to come up with the graphical interface that better equilibrated the user capabilities and preferences with the performance of the system (recall that the shape and the time of the P300 potential are correlated with the visual aspects [10], which affects the performance of the pattern recognition system). First, we selected the aesthetic factors of the visual display based on a parallel study [18], and we designed the experiments to study whether this interface elicited the desired neurological phenomenon. Every user completed 8 screening trials with the two teleoperation modes. Then, the data collected was used to train the system using the machine learning technique. Secondly, we designed an online test to check whether the pattern recognition accuracy was greater than 90%, qualifying the subject for the next step. This session lasted 3 hours for each subject.
Teleoperation Evaluation
The objective of this battery of experiments was to test the teleoperation between remote places (two cities) and to record the data for a posterior evaluation. The experiments were accomplished the week of June, 23th 2008, between the BCI laboratory at the University of Zaragoza (Spain) and the University of Vilanova i la Geltrú (Spain), at a distance of 260km. We designed two tasks in two different circuits that combined jointly navigation and visual exploration to evaluate the boundaries of the system and to assess its performance.
Task 1 addresses navigation in constrained spaces with an active search of two visual targets.
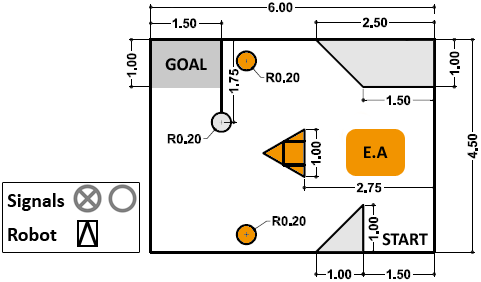
The task 1 was to drive the robot from the start to the goal area. However, in the exploration area (E.A in the figure), the user had to search for two signals located at 2.5m from the floor in the shaded cylinders. If both signals were equal they had to avoid the shaded triangle to the right-hand side, otherwise to the left-hand side of it. All measures are in meters and the robot is to scale.

Image of the real circuit of the task 1 in the University of Vilanova i la Geltrú (Spain).
Task 2 addresses navigation in open spaces with an active search of one visual target. Each subject performed each task twice, and the session lasted 4 hours.
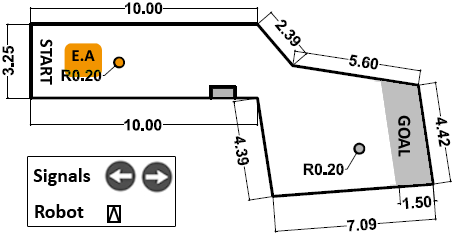
The task 2 was to drive the robot from the start to the goal area. Again, in the exploration area the user had to search for a signal located in the shaded cylinder. Depending on the signal, they had to avoid the two cylinders to the specified side. All measures are in meters and the robot is to scale.
 |
 |
Images of the real circuit of the task 2 in the University of Vilanova i la Geltrú (Spain).