[TFM – finalizado] Sistema multi-cámara para la reconstrucción volumétrica de objetos 3D
Estrategias Sistema multi-cámara para la reconstrucción volumétrica de objetos 3D
Estudiante: Enrique Hernández Murillo
Defendido en: 2019 (link)
Directores: Gonzalo López Nicolás, Rosario Aragüés
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Máster Universitario en Ingeniería Industrial
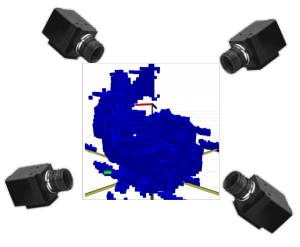
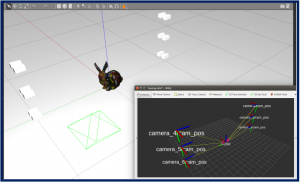
El objetivo del TFM era desarrollar un algoritmo de seguimiento y reconstrucción volumétrica de un objeto móvil deformable usando un equipo de cámaras. Se usaron algoritmos de consenso dinámico distribuido, combinados con métodos para reconstrucción volumétrica. El funcionamiento del conjunto se validó sobre el simulador Gazebo.
Parte de este trabajo se presentó en las Jornadas de Jóvenes Investigadores del I3A, 2019, Instituto Universitario de Investigación en Ingeniería en Aragón (link), y en el congreso Emerging Technologies and Factory Automation ETFA2019 (link).