[TFM – finalizado] Estrategias Multi-Robot de Despliegue y Cobertura con Mantenimiento de la Conectividad
Estrategias Multi-Robot de Despliegue y Cobertura con Mantenimiento de la Conectividad
(vídeo1)(vídeo2)(vídeo3)(vídeo4)(link)
Estudiante: Javier Tardós
Defendido en: 2017
Directores: Rosario Aragüés, Carlos Sagüés
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Máster Universitario en Ingeniería Industrial
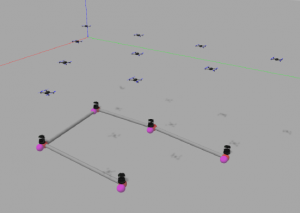
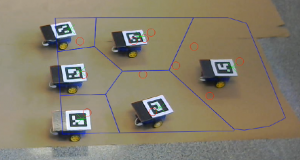
El objetivo del TFM era desarrollar un algoritmo de seguimiento de objetivos móviles partiendo de un algoritmo de cobertura para entornos estáticos existente. Se realizó asimismo una implementación del sistema sobre el simulador Gazebo con el objetivo de analizar el comportamiento del algoritmo propuesto ante distintas situaciones.