[TFG – finalizado] Simulación de un sistema multi-robot distribuido envarios equipos con ROS
Simulación de un sistema multi-robot distribuido envarios equipos con ROS
Estudiante: Ignacio Colás
Defendido en: 2020 (link)
(Vídeo 1: Comportamiento estándar del algoritmo de Reynolds)
(Vídeo 2: Reynolds con alta cohesión)
(Vídeo 3: Reynolds con alta separación)
(Vídeo 4: Reynolds con alta alineación)
(Vídeo 5: Algoritmo de seguimiento de región (30 robots))
(Vídeo 6: Algoritmo de seguimiento de región (70 robots))
Directores: Enrique Teruel, Rosario Aragüés
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingeniería Electrónica y Automática
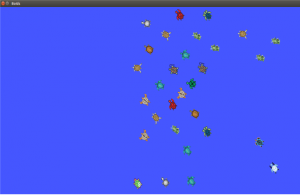
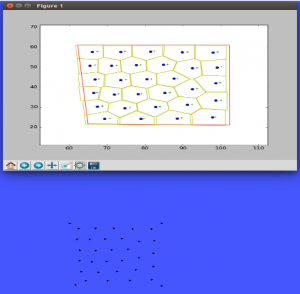
El objetivo del TFG era desarrollar estrategias multi robot en el entorno ROS. La primera estrategia es el método clásico de Reynolds (Boids) de flocking multi robot, que simula comportamientos al de grupos de animales en la naturaleza, como los bancos de peces o las bandadas de pájaros. La segunda estrategia es un método de seguimiento dinámico de una región con un equipo multi robot, con aplicaciones a la monitorización cooperativa de una zona de interés. Además, se realizó una exploración sobre como distribuir estas simulaciones sobre una red de ordenadores.