[TFG – finalizado] Montaje y control coordinado de dos brazos robóticos
Montaje y control coordinado de dos brazos robóticos
Estudiante: Josué Poma
Defendido en: 2019 (link)
Directores: Gonzalo López Nicolás, Rosario Aragüés
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingeniería de Tecnologías Industriales
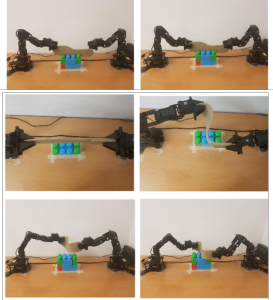
En el TFG se usaron dos brazos robóticos PhantomX Pincher de 4 grados de libertad (GDL). Se abordaron tareas relacionadas con el montaje de los brazos, el cálculo de su modelo geométrico, la implementación de los modelos cinemáticos directo e inverso, y la generación de trayectorias cartesianas. Además, se desarrolló una tarea coordinada de manipulación de un objeto sólido deformable.