[TFG – finalizado] Manipulación robótica colaborativa mediante el Sistema Operativo Robótico
Manipulación robótica colaborativa mediante el Sistema Operativo Robótico
Estudiante: Inazio Gracia
Defendido en: 2019 (link)
Directores: Gonzalo López Nicolás, Rosario Aragüés
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingeniería de Tecnologías Industriales
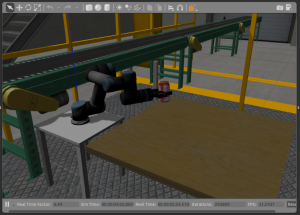
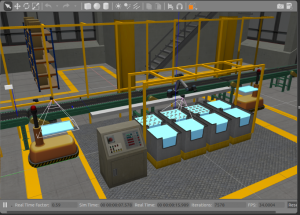
En el TFG se probaron distintas funcionalidades de ROS/Gazebo para controlar robots industriales (ABB IRB 120 y Universal Robots UR5) equipados con diferentes herramientas (pinza robótica y herramienta de vacío). A modo de prueba de concepto, se desarrollaron dos tareas de manipulación e interacción con elementos de la célula de trabajo.