[TFG FINALIZADO] Simulación de objetos deformables en ROS y Gazebo
Simulación de objetos deformables en ROS y Gazebo
Estudiante: Iván Sanjuán
Defendido en: 2021 (link)
Directores: Rosario Aragüés, Gonzalo López-Nicolás
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingeniería Electrónica y Automática
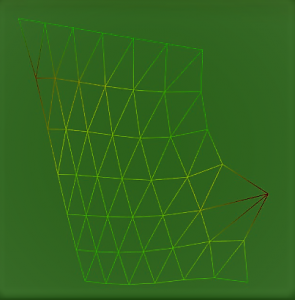

El objetivo del TFG era profundizar en el modelado de objetos deformables en el campo de la robótica. El simulador de robótica 3D Gazebo que se usa habitualmente para realizar pruebas de algoritmos robóticos, y que se encuentra fuertemente ligado al entorno ROS(Robot Operating System), está principalmente orientado a la simulación de objetos rígidos en el entorno. En este trabajo, se realizó la simulación de un objeto deformable tipo tela elástica, representado mediante el modelo interconnected mass-spring-damper. Para ello, se desarrollaron plugins específicos para Gazebo.