[TFG – finalizado] Navegación de robots manipuladores en el entorno de ROS
Navegación de robots manipuladores en el entorno de ROS

Estudiante: Jorge Playán
Defendido en: 2019 (link)
Directores: Gonzalo López Nicolás, Rosario Aragüés
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingenería Electrónica y Automática
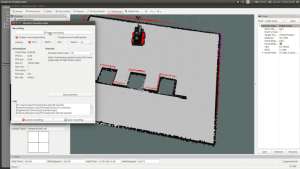
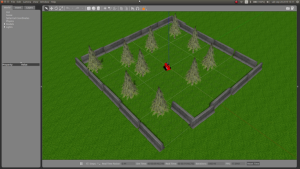
En el TFG se abordaron tareas de navegación autónoma usando “Robot Operating System” (ROS) para dos robots diferentes (uno comercial, Turtlebot, y otro en desarrollo, Campero). Se realizaron simulaciones de navegación en dos entornos desarrollados para Campero (indoors y outdoors), usando los dos tipos de ruedas que incluye el robot: diferenciales y omnidireccionales.