[TFG – finalizado] Exploración cooperativa de un entorno con un equipo multi-robot de bajo coste
Exploración cooperativa de un entorno con un equipo multi-robot de bajo coste
Estudiante: Carlos Morales Jarque
Defendido en: 2018 (link)
Directores: Rosario Aragüés, Raúl Igual
Universidad de Zaragoza, Escuela Universitaria Politécnica de Teruel. Grado en Ingenería Electrónica y Automática

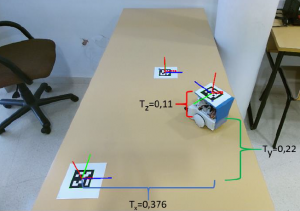
El objetivo del TFG era poner en marcha robots de bajo coste y pequeñas dimensiones para realizar experimentos en entornos controlados de estrategias de control de movimientos. Se puso en marcha una plataforma compuesta por un robot Sparki de Arcbotics, una cámara externa, un ordenador, y varias marcas Aruco en el robot y en el entorno.