[PFC – finalizado] Reconstrucción 3D en Sistemas Multi-Robot Utilizando Cámaras RGB-D

Reconstrucción 3D en Sistemas Multi-Robot utilizando Cámaras RGB-D
Alumno: Sergio Ayuso Gascón (sergioayuso25@gmail.com)
Defendido en: 2013 (link)
Directores: Rosario Aragüés y Carlos Sagüés
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Ingeniería Industrial
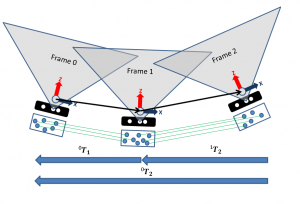
El proyecto de fin de carrera se centró en el uso de cámaras RGB-D para la reconstrucción de mapas 3D con un equipo compuesto por varios robots.
Parte de los resultados se presentaron en una conferencia internacional (Int. Conf. on Informatics in Control, Automation and Robotics (ICINCO), 2013, Reykjavík, Iceland).