

![]()
![]()
![]()
When solving the Simultaneous Localization and Mapping (SLAM) problem, submapping and graphical methods have shown to be valuable approaches that provide significant advantages over the standard EKF solution: they are faster and can produce more consistent estimates when using local coordinates. CI-Graph, is a submapping method for SLAM that uses a graph structure to efficiently solve complex trajectories reducing the computational cost. Unlike other submapping SLAM approaches, we are able to transmit and share information through maps in the graph in a consistent manner by using conditionally independent submaps. In addition, the current submap always summarizes, without further computations, all information available making CI-Graph be an intrinsically “up to date” algorithm. Moreover, the technique is also efficient in memory requirements since it does not need to recover the full covariance matrix.
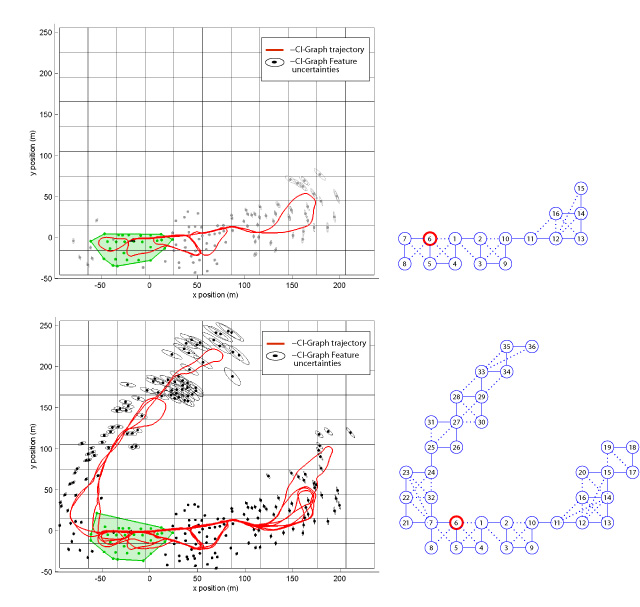
Fig. 1. CI-Graph SLAM execution on Victoria Park data set. The robot traverses local regions across the environment (left). During exploration, only the last submap is updated with all information available (top). At the same time, a graph is being created with darker node as the current visited submap (right). The final result is obtained after building 36 nodes (submaps) using 30m of resolution in x, y dimensions for our cell-grid (bottom).
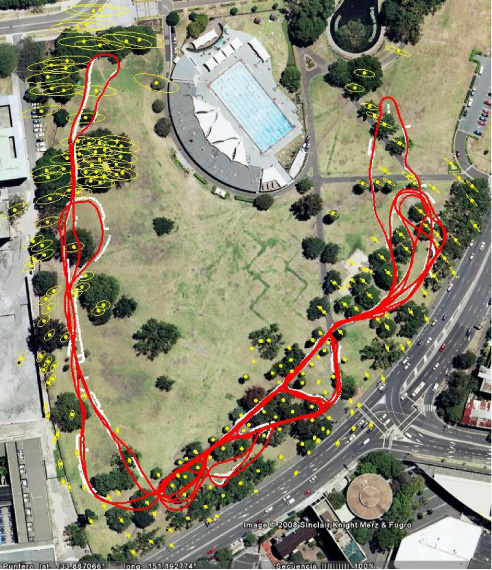
Fig. 2. Final Map obtained after running CI-Graph SLAM on Victoria Park data set. The map is projected using google Earth tool together with GPS data (white points).
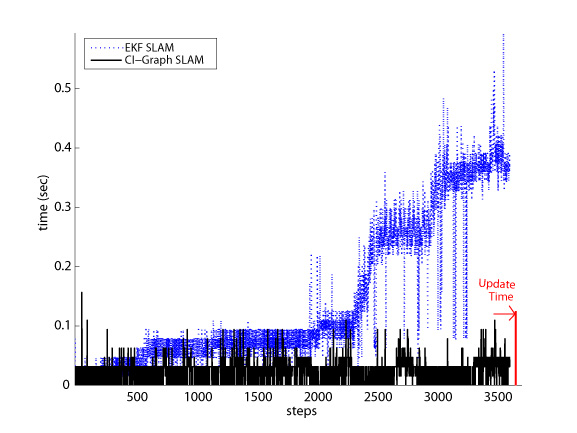
Fig. 3. CI-Graph SLAM vs. EKF SLAM running times per step. Last time value corresponds to he time due to updating all submaps. CI-Graph only requires one third of the time required for EKF SLAM to compute the optimum map in the last step.
Related publication:
CI-Graph: An efficient approach for Large Scale SLAM (submitted to ICRA 09)
Related videos:
Some results obtained using a stereo camera to map urban outdoor and indoor environments: We combine Conditional independent Local maps and D&C SLAM developed by Lina María Paz .

Fig. 1. Stereo vision system used to acquire the image sequences. Picture on the left shows the experimental setup during the data acquisition for an indoor experiment.
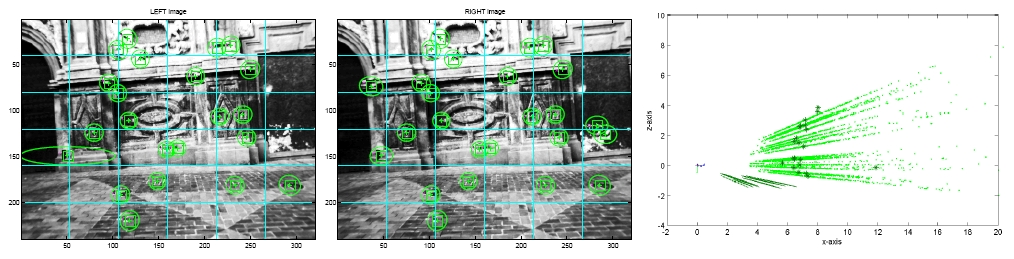
Fig. 2. Points detected using a stereo camera. Projection of map features on both left (left) and right (middle) images. We show feature uncertainties from a lateral perspective (right): 3D feature uncertainties are drawn using darker ellipses whereas we use samples to show the inverse depth feature uncertainties. The Submitted Video VSLAM_local_map.avi illustrates the process of building a single local submap.
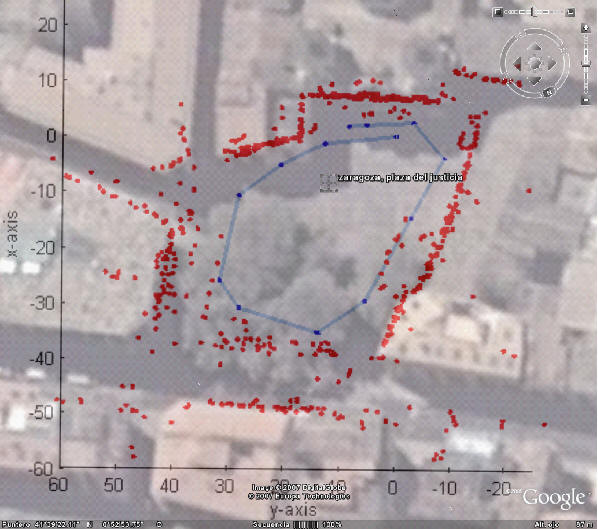
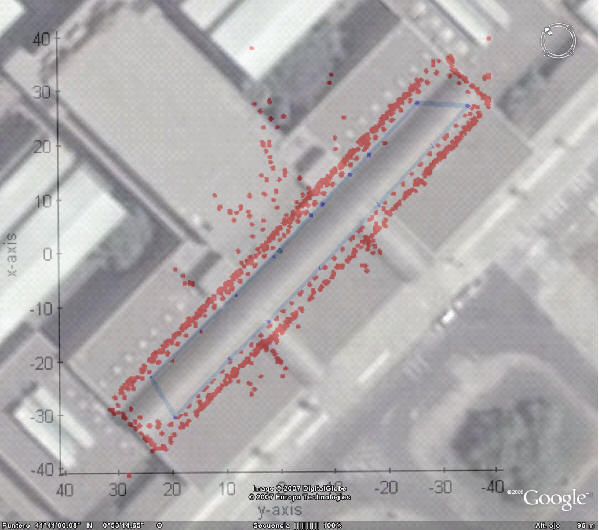
Fig. 3. Stereo visual SLAM recovers the true scale: the building environment (top) and the Public square (bottom) overlapping Google Earth.
Related publications:
Large Scale 6DOF SLAM with Stereo-in-hand [pdf]
Related videos:
VSLAM local map (avi file 5.66Mb)
VSLAM stereo distribution (avi file 0.236Kb)
VSLAM video indoor (avi file 13,3 MB)
VSLAM video outdoor (avi file 27,1 MB)
Tracking textures from features (avi file 5,23 MB)
Repeatitiveness of a patch (avi file 764 KB)
Closing a loop (avi file 4,71 MB)
Monocular SLAM
using CI-Submaps
SLAM algorithms based on local maps have been demonstrated to be well suited for mapping large environments as they reduce the computational cost and improve the consistency of the final estimation. The main contribution of this work is a novel submapping technique that does not require independence between maps. The technique is based on the intrinsic structure of the SLAM problem which allows the building of submaps that can share information, remaining conditionally independent. The resulting algorithm obtains local maps in constant time during the exploration of new terrain, and recovers the global map in linear time after simple loop closures, without introducing any approximations besides the inherent EKF linearizations. The memory requirements are also linear with the size of the map. As the algorithm works in covariance form, well-known data association techniques can be used in the usual manner. We present experimental results using a hand-held monocular camera, building a map along a closed loop trajectory of 140m in a public square, with people and other clutter. Our results show that the combination of conditional independence, that enables the system to share camera and feature states between submaps, and local coordinates, that reduce the effects of linearization errors, allow us to obtain precise maps of large areas with pure monocular SLAM in real time.
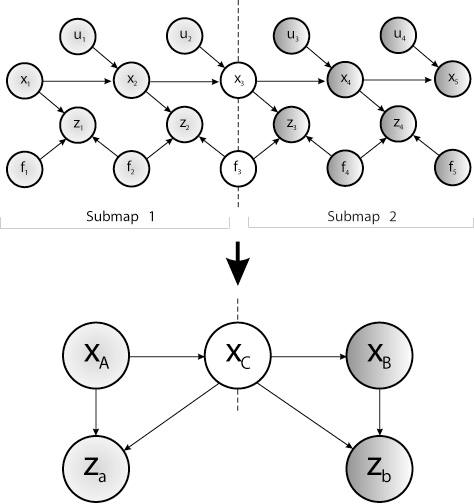
Fig. 1. Bayesian Network that describes the probabilistic dependencies between SLAM variables. This structure is the base of the CI-Submaps algorithm.

Fig. 2. Map for Victoria Park dataset according to D&C SLAM. The results were projected on Google Earth in order to compare the precision obtained. Vehicle locations are drawn as red triangles when available in D&C SLAM. Yellow elements represent features estimates.
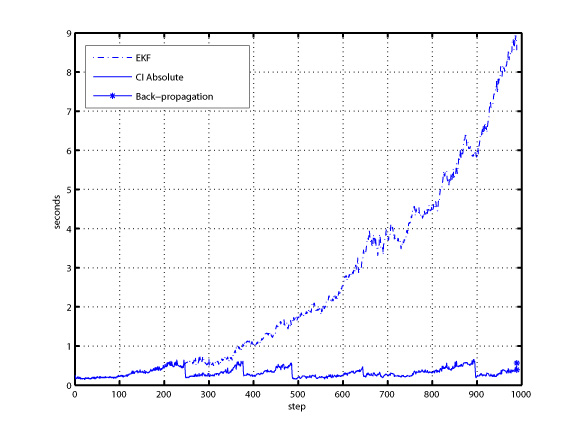
Fig. 3. Comparison of the computational times required by the standard EKF and our CI method using Absolute submaps after processing the first 1000 images of the experiment in a MATLAB implementation. At the end of the CI Absolute time we show as well the minimal time spent on performing a back-propagation to update all previous submaps
Related publications:
Large Scale SLAM Building Conditionally Independent Local Maps: Application to Monocular Vision [pdf]
Related video:
CI-SLAM with Monocular Vision (avi file 10Mb)