
Some results obtained using a stereo camera to map urban outdoor and indoor environments: We combine Conditional independent Local maps developed by Pedro Piniés and D&C SLAM.

Fig. 1. Stereo vision system used to acquire the image sequences. Picture on the left shows the experimental setup during the data acquisition for an indoor experiment.
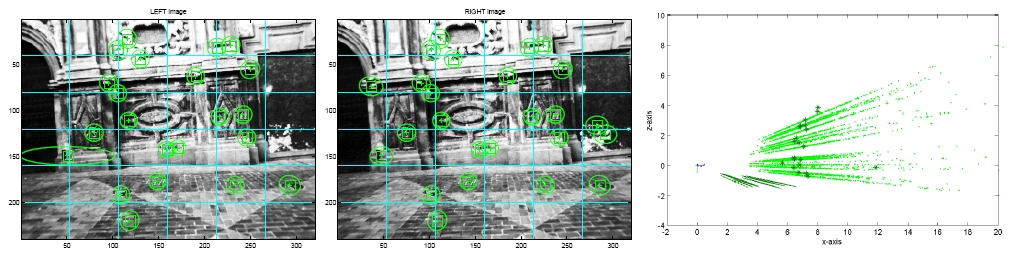
Fig. 2. Points detected using a stereo camera. Projection of map features on both left (left) and right (middle) images. We show feature uncertainties from a lateral perspective (right): 3D feature uncertainties are drawn using darker ellipses whereas we use samples to show the inverse depth feature uncertainties. The Submitted Video VSLAM_local_map.avi illustrates the process of building a single local submap.
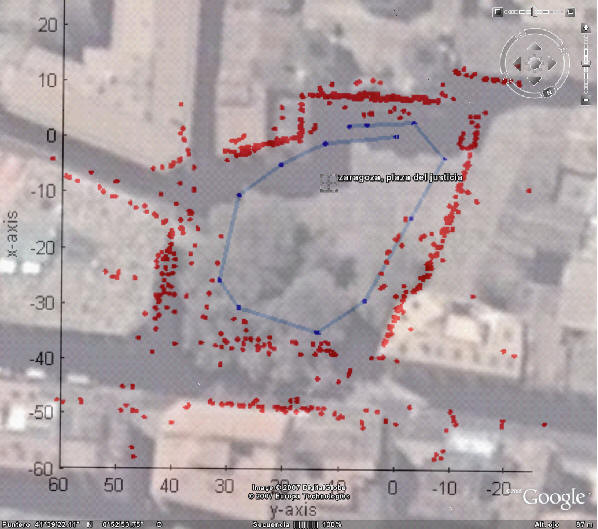
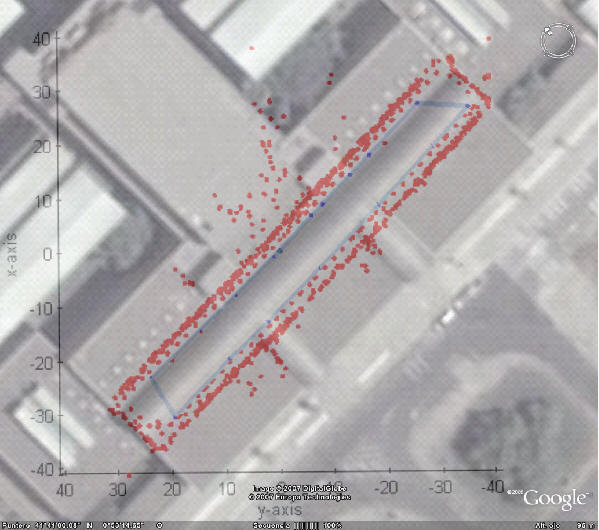
Fig. 3. Stereo visual SLAM recovers the true scale: the building environment (top) and the Public square (bottom) overlapping Google Earth.
Related publications:
Large Scale 6DOF SLAM with a stereo camera in hand
6DOF SLAM with stereo camera in hand [pdf]
Related videos:
VSLAM local map (avi file 5.66Mb)
VSLAM stereo distribution (avi file 0.236Kb)
VSLAM video indoor (avi file 13,3 MB)
VSLAM video outdoor (avi file 27,1 MB)
Tracking textures from features (avi file 5,23 MB)
Repeatitiveness of a patch (avi file 764 KB)
Closing a loop (avi file 4,71 MB)
Local mapping techniques in O(n)
Improving computational complexity and consistency in SLAM: we have developed a new algorithm called Divide and Conquer (D&C) SLAM, that reduces the cost per step to O(n) and provides more consistent maps. Some of the results obtained can be seen in the following videos, where we compare with standard EFK SLAM:
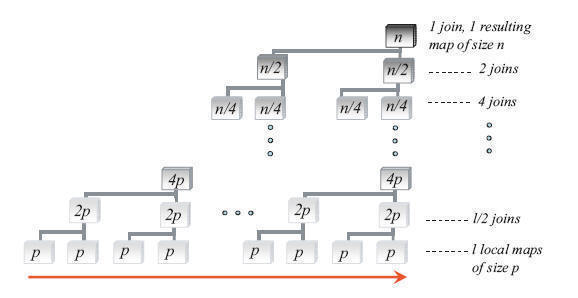
Fig. 1. Hierarchy of maps that are created and joined in D&C SLAM. The lower level is the sequence of l local maps of size p computed with standard EKF SLAM as the arrow suggests. The intermediate levels represent intermediate joins during the process. The top level represents the final map of size n resulting from the join of two local maps os size n=2.

Fig. 2. Map for Victoria Park dataset according to D&C SLAM. The results were projected on Google Earth in order to compare the precision obtained. Vehicle locations are drawn as red triangles when available in D&C SLAM. Yellow elements represent features estimates.
Fig. 3. Time per step of EKF SLAM vs. amortized time per step of D&C SLAM
Related publications:
Divide and Conquer : EKF SLAM in O(n)
Data association in O(n) for Divide and Conquer SLAM [pdf]
EKF SLAM updates in O(n) with Divide and Conquer SLAM [pdf]
Related videos:
D&C SLAM using Victoria Park dataset (avi file 17.3Mb)
D&C SLAM, loop trajectory (avi file 2.9Mb)
D&C SLAM, lawn trajectory (avi file 3.4Mb)
D&C SLAM, spiral trajectory (avi file 3.1Mb)