PROJECTS |
|
| Visual semantic maps of rigid and non-rigid scenes | |
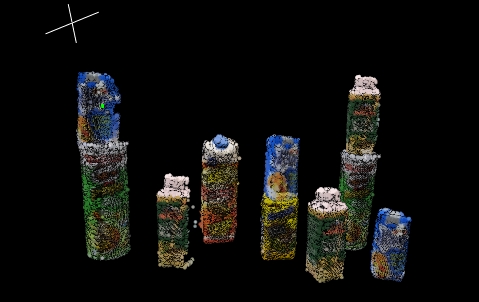 |
The aim of this project is developing
scene understanding methods that boost the semantic contents of the
map: object recognition and insertion in the map, scene layout
estimation, and scene recognition. We also plan to address long-term
mapping and apply learning techniques to determine which pieces of
information are obsolete or ephemeral and which are trustworthy for
place recognition and camera relocation. |
RoboEarth |
|
 |
The aim of RoboEarth
is to use the internet to create a giant open source network database
that can be accessed and continually updated by robots around the
world. With knowledge shared on such a vast scale, and with businesses
and academics contributing independently on a common language platform,
RoboEarth has the potential to provide a powerful feed forward to any
robot's 3D sensing, acting and learning capabilities. |
System for surveillance, search and rescue in the sea by means of collaboration of autonomous marine and air vehicles |
|
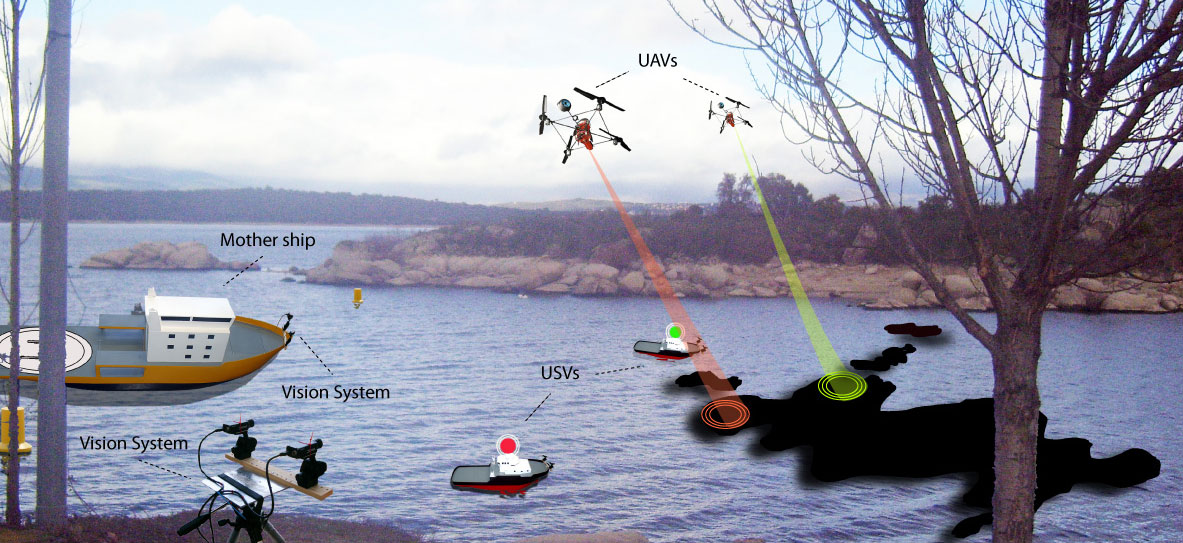 |
In this project, we present the coordination of unmanned surface vessel (USVs) and unmanned aerial vehicles (UAVs) to get a fast response in case of contingencies in the sea. Two types of scenario are considered: substance diffusion control on the sea (pollutants spill) and shipwrecked rescue. Both objectives are dynamical and need a fast response. The considered scenario supposes search and tracking with the following vehicles: a) surface vessels, b) unmanned aerial vehicles, c) a mother ship that supports to the other vehicles. The UAVs will be rotorcrafts with a visual perception module to help in the search and identification of targets and substances, and in landing and taking off in the ship. The goal of the UAVs is, to localize, to identify and, in the case of pollutants substance, to delimit the surface, and inform to USVs, which rescue the shipwrecked and substances in minimum time. |