MiniNet: An Efficient Semantic Segmentation ConvNet for Real-time Robotic Applications
Abstract
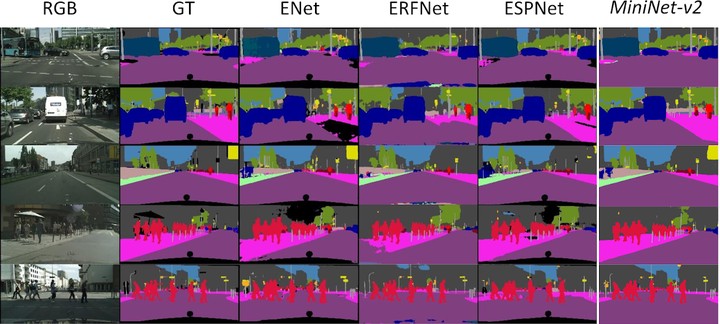
Efficient models for semantic segmentation, in terms of memory, speed, and computation, could boost many robotic applications with strong computational and temporal restrictions. This article presents a detailed analysis of different techniques for efficient semantic segmentation. Following this analysis, we have developed a novel architecture, MiniNet-v2 , an enhanced version of MiniNet . MiniNet-v2 is built considering the best option depending on CPU or GPU availability. It reaches comparable accuracy to the state-of-the-art models but uses less memory and computational resources. We validate and analyze the details of our architecture through a comprehensive set of experiments on public benchmarks (Cityscapes, Camvid, and COCO-Text datasets), showing its benefits over relevant prior work. Our experiments include a sample application where these models can boost existing robotic applications.