Domain Adaptation in LiDAR Semantic Segmentation by Aligning Class Distributions
Abstract
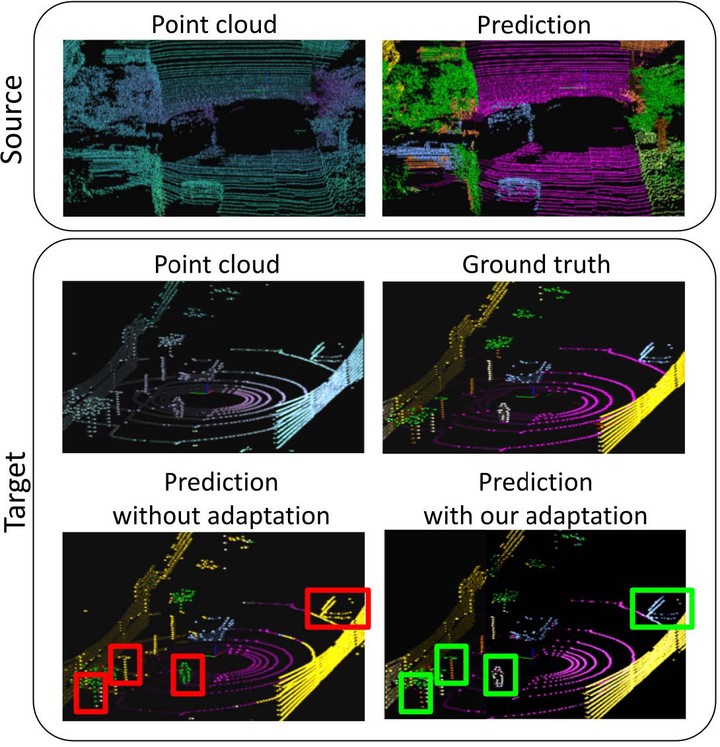
LiDAR semantic segmentation provides 3D semantic information about the environment, an essential cue for intelligent systems during their decision making processes. Deep neural networks are achieving state-of-the-art results on large public benchmarks on this task. Unfortunately, finding models that generalize well or adapt to additional domains, where data distribution is different, remains a major challenge. This work addresses the problem of unsupervised domain adaptation for LiDAR semantic segmentation models. Our approach combines novel ideas on top of the current state-of-the-art approaches and yields new state-of-the-art results. We propose simple but effective strategies to reduce the domain shift by aligning the data distribution on the input space. Besides, we propose a learning-based approach that aligns the distribution of the semantic classes of the target domain to the source domain. The presented ablation study shows how each part contributes to the final performance. Our strategy is shown to outperform previous approaches for domain adaptation with comparisons run on three different domains.