TFGs y TFMs disponibles
Propuestas actuales
Las propuestas actuales están en esta carpeta:
(Propuestas actuales)
Universidad de Zaragoza
Propuestas actuales
Las propuestas actuales están en esta carpeta:
(Propuestas actuales)
Defendido en: 2020 (link)
(Canal de vídeos con los experimentos)
Directores: Rosario Aragüés, Gonzalo López-Nicolás
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingeniería Electrónica y Automática
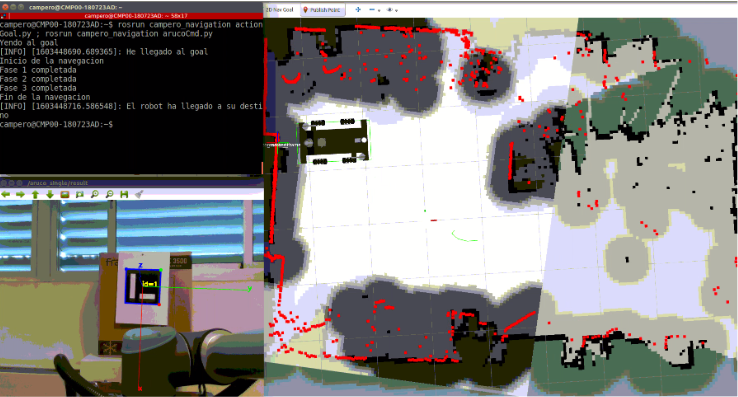

En este trabajo se ha usado el entorno ROS (Robot Operating System) para realizar la navegación autónoma de un robot manipulador móvil. La navegación se ha realizado tanto en simulación como en entornos reales. Se ha usado un robot conocido como robot Campero, que es un prototipo del robot comercial RB-EKEN (Robotnik). Para la navegación se usan tanto sensores láser como visión. Se han desarrollado varios programas para distintos tipos de navegación y se han analizado sus resultados. Además, este trabajo cuenta con información detallada sobre como usar el robot Campero en el entorno ROS, así como la información necesaria para replicar los experimentos.
Defendido en: 2020 (link)
(Vídeo 1: Seguimiento de trayectoria rectangular mediante el control desarrollado)
(Vídeo 2: Trayectoria rectangular mediante topic cmd_vel)
(Vídeo 3: Trayectoria rectangular mediante action pose)
Directores: Rosario Aragüés, Enrique Teruel
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingeniería Electrónica y Automática

El objetivo de este proyecto es el control del vuelo de un cuadricóptero simulado siguiendo una trayectoria planificada. Para ello se han usado paquetes de ROS, hector quadrotor, que modelan el comportamiento de un dron genérico y su simulación. Para el control se ha desarrollado un módulo al que se supone la llegada externa de puntos planificados con una determinada separación temporal que constituyen la trayectoria. Un algoritmo calcula la velocidad a tomar por el dron en función de su posición y la planificación con una cierta periodicidad. Esta velocidad es comunicada al modelado del dron, quien efectúa los movimientos pertinentes. Las simulaciones llevadas a cabo comprueban el correcto funcionamiento del controlador implementado. El dron alcanza los objetivos en los tiempos esperados con movimientos suaves y controlados.
Defendido en: 2021 (link)
Directores: Rosario Aragüés, Gonzalo López-Nicolás
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingeniería Electrónica y Automática
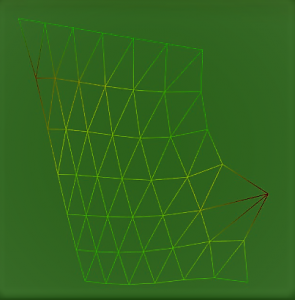

El objetivo del TFG era profundizar en el modelado de objetos deformables en el campo de la robótica. El simulador de robótica 3D Gazebo que se usa habitualmente para realizar pruebas de algoritmos robóticos, y que se encuentra fuertemente ligado al entorno ROS(Robot Operating System), está principalmente orientado a la simulación de objetos rígidos en el entorno. En este trabajo, se realizó la simulación de un objeto deformable tipo tela elástica, representado mediante el modelo interconnected mass-spring-damper. Para ello, se desarrollaron plugins específicos para Gazebo.
Defendido en: 2020 (link)
(Vídeo 1: Comportamiento estándar del algoritmo de Reynolds)
(Vídeo 2: Reynolds con alta cohesión)
(Vídeo 3: Reynolds con alta separación)
(Vídeo 4: Reynolds con alta alineación)
(Vídeo 5: Algoritmo de seguimiento de región (30 robots))
(Vídeo 6: Algoritmo de seguimiento de región (70 robots))
Directores: Enrique Teruel, Rosario Aragüés
Universidad de Zaragoza, Escuela de Ingeniería y Arquitectura. Grado en Ingeniería Electrónica y Automática
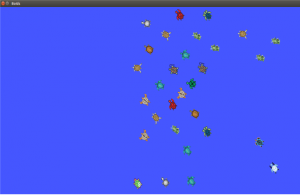
El objetivo del TFG era desarrollar estrategias multi robot en el entorno ROS. La primera estrategia es el método clásico de Reynolds (Boids) de flocking multi robot, que simula comportamientos al de grupos de animales en la naturaleza, como los bancos de peces o las bandadas de pájaros. La segunda estrategia es un método de seguimiento dinámico de una región con un equipo multi robot, con aplicaciones a la monitorización cooperativa de una zona de interés. Además, se realizó una exploración sobre como distribuir estas simulaciones sobre una red de ordenadores.