5007439
SLAM: Localización de robots y construcción
simultánea de mapas
SLAM simulator
for MatLab
The slam.m program is a
simple SLAM simulation written in MatLab.
A mobile robot carries out a square trajectory in an environment with
point features at each side of the trajectory, similar to a cloister (see
figure below; red points and trajectory are ground truth):
The vehicle is equipped with a point detector whose characteristics
(range, precision) can be modified.
Vehicle odometry can also be modified.
You can also try different data association algorithms: the Nearest
Neighbour, the Joint Compatibility Branch and Bound, or your own!
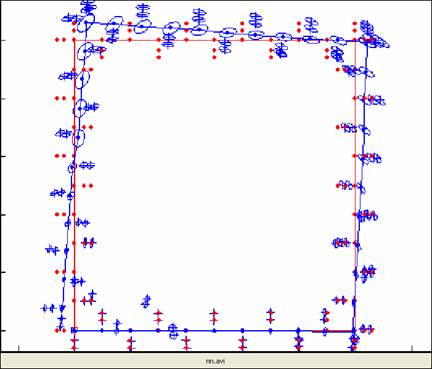
- Load slam.m, find where data association is done and try the
nearest neighbour (NN)
algorithm.
- Complete SINGLES and try it:
You have observations.m observations, and prediction.n predicted features.
For every observation i,
check whether it has only one neighbour,
feature, and whether that
feature j has only that one neighbour
observation i. If so, H(i) = j.
You will need to check the compatibility.ic matrix
for this:
compatibility.ic(i,j) = 1 if observation i is a neighbour of
feature j.
- Include
people (configuration.people
= 1) and try SINGLES
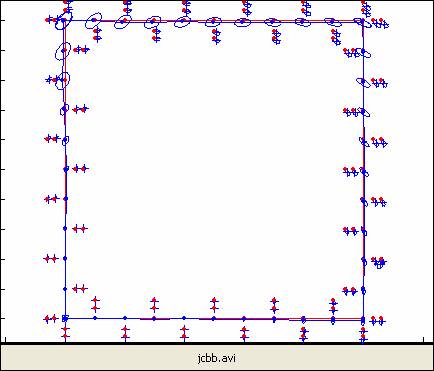
- Try Joint
Compatibility Branch and Bound (JCBB)