Mapping Static and Dynamic Scenarios
Currently, the
vehicle motion in unknown and dynamic environments is computed by hybrid
architectures that combine aspects of modelling, tactical planning and
obstacle avoidance. The skill to model the environment distinguishing the
dynamic and static parts opens a new dimension in these systems, since it
allows a selective treatment of these information that improves the
performance of the next modules. This greatly ameliorates the overall
behaviour of the sensor-based navigation system. Here
we present a modelling module that includes the detection and tracking of
moving objects, and its integration within the navigation architecture
that currently works on our wheelchair vehicle.
A reliable
solution to the motion problem must address both,
a module able to model the static and dynamic parts of the scenario, and
the integration within an architecture of integration able to deal with
the typical navigation issues. In fact these are two contributions of this
work. The first is a modelling module that carries out DATMO and SLAM at
the same time. Our formulation extends the work of
Wang 2003 to jointly classify
the nature of the observations and solve the SLAM problem. The second
contribution is the integration of this module in the architecture. The
usage of the static and dynamic information selectively by the planning
and obstacle avoidance modules allows to avoid the undesirable situations
outlined previously, while fully exploiting the advantages of an hybrid
sensor-based navigation system. This system has been integrated in
a wheelchair vehicle. For further details see
the work of Luis Montesano.
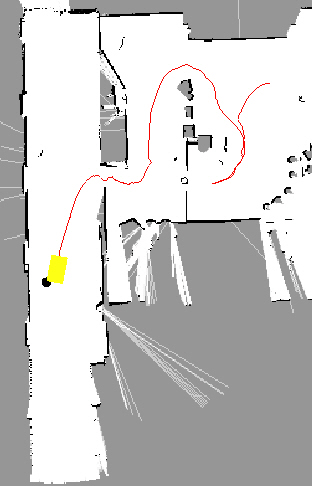
We show next
some experiments carried with the wheelchair vehicle