SGRobot
Graphics simulator of manipulator robots
(Simulador gráfico de robots manipuladores)
Overview
SGRobot is a graphical simulation tool that allows the programming of robot arms both in a graphical way (guided) or in a textual way.
The SGRobot provides three related applications:
1- The object builder (constructorObjetos.exe): It allows the design of the objects that are going to be manipulated by the implemented robot or are part of the environment. It is also used for defining the 3D components of any designed new robot or robot tool.
2- The editor-compiler (CCVAL2.exe): The editor-compiler of the robotic programming language CVAL2 developed for SGRobot. The CVAL2 is a defined programming language similar to the commercial language VAL II.
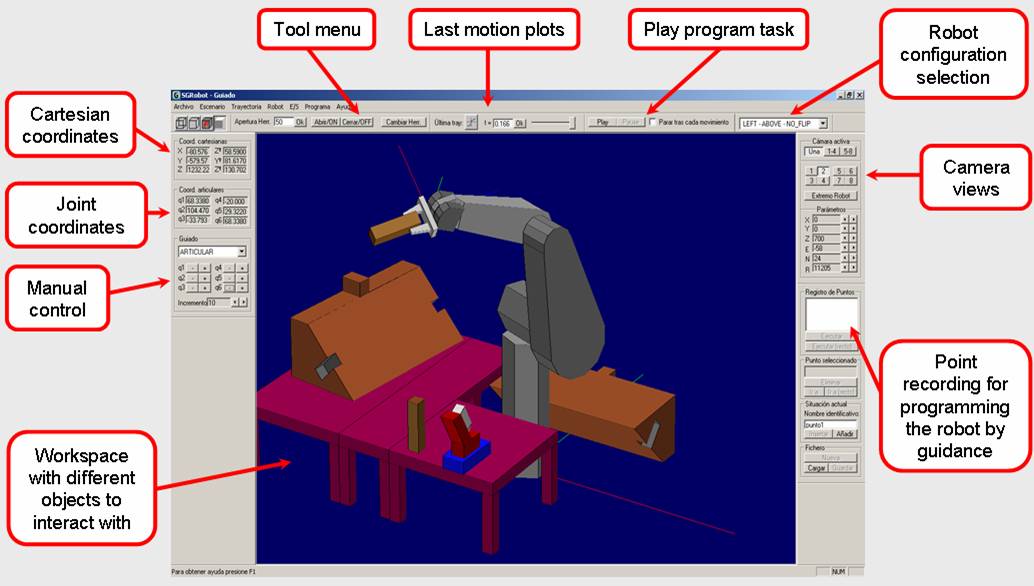
3- Guidance tool (Guiado.exe): The SGRobot also provides the guidance tool, which is for programming the robot by guidance, graphical representation of trajectories, object manipulation, etc. This is the main application, an interactive tool that allows guiding the robot from the computer keyboard, recording points, trajectory execution, plot results and many other features.
As said, the user can build additional robots; the following robots are already available in the program:
|
|
|
|
|
Puma 560 Unimation |
Robot Stanford |
Robot Fanuc |
Screenshot of the SGRobot interface:
Download
The program can be downloaded here: SGRobot (4,5 MB)
Contents: The file includes the executables, manuals, examples of scenes, examples of programs in CVAL2,...
Installation: Run setup.exe
Note: The program runs in Windows platforms and it can be run without installation, although some program features would not work properly.
Note: The program menus and manuals are in Spanish.
This simulation tool has been developed at the Universidad de Zaragoza and can be freely distributed for research or education purposes. For more details about the authors see the credits in the program.
Contact: For further information
about SGRobot, please contact
J. J. Guerrero ,
G. López-Nicolás
If
you use this tool, please cite the following paper: G.
López-Nicolás, A. Romeo, J. J. Guerrero. Active learning in robotics based
on simulation tools. Computer Applications in Engineering Education,
September 2011 DOI: 10.1002/cae.20576.